标准分类号
标准ICS号:25.010
中标分类号:机械>>机械综合>>J04基础标准与通用方法
相关单位信息
复审日期:2004-10-14
起草单位:郑州机械研究所
发布部门:国家标准化管理委员会
主管部门:国家标准化管理委员会
标准简介
GB/T 11349.2-1989 机械导钠的试验确定 用激振器作单点激励测量 GB/T11349.2-1989
标准内容
中华人民共和国国家标准
机械导纳的试验确定
用激振器作单点激励测量
Eiperimental determination of mechanlcalmobility-Mesurments uslng single -pointtranslatlon excitatlon with an attached vibration exciter1 主题内容与适用范围
GB 11349.289
本标准规定了用单个接触式激振器进行激振,测量结构(如建筑物、机器和车辆)的机导纳或其他频率响应函数的方法。
本标准适用于单点激励下,单点或多点测盘导纳、加速度导纳或位移导纳,既可以是激励点处的驱动点导纳的测盘(驱动点测量),也可以是驱动点与其他点之间的传递导纳的测量(传递测量)。也适用于确定这些频率愉应函数的倒数,如自由加速度阻抗(自由有效质量)的测量。2引用标准
GB 2298机械振动、冲卡名词术语GB10084振动、冲击数据分析和表示方法GB7670电动式振动台特性描述
GB11349.1机概导纳的试验确定基本定义与传感器3测量系统的总体结构
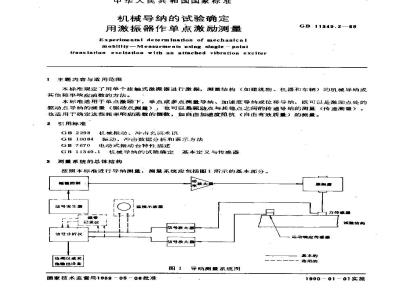
按照本标准进行导纳测蛋,测最系统应包括图1所示的基本部分。幅值控制
信号发生器
记录位
信号分析议
给图仪费其
他糖出设备
「监视示波器
固家技术监督局1989-05-08批准信号坡大
临号放大题
导纳测量系统图
激娠器
力你惑器
试脸结构
运动响应传感器
基本的
选用的
1990-01- 01实施
是据试验要求,
【支承条件下的测量
进行导纳试验。微撤器对结构的约束除非另加说明,试验结构的支承应代表结构在实际应用中的支承状况。试验报告应说明支承自由悬挂条件下的测
GB 113,2-8
响应波形的时城同步平均,此时建议重复运用这些波形。5.1.4.1伪随机激励
根据所要求的激励谱,在频域内对励信号进行数字合成。将其进行逆傅里叶变换得到一个具有周期性的数字信号,经数模转换后用来驱动激搬器:5.1.4.2周期正弦快扫激励
周期正弦快扫就是重复的快速正弦扫描信号,其频率在选择的频段内上下扫描。该信号可数字合成或由一个扫描振荡器产生,并与被形平均的信号处理器同步,以提高信噪比5.1.4.3周期脉冲激励
周期脉冲通常是由数字合成的适当形状的脉冲函数重复得到的。信号处理器应与信号发生器同步。为满足激励频率的要求,应当选择脉冲函数的形状(如半正弦函数等)。5.1.4.4周期随机激励
周期随机激励综合了纯随机和伪随机激励的优点,它既满足周期性的条件,又随时间变化,以真正的随机方式对结构进行激励。在一个周期内,它先输出一个伪随机信号,当结构达到稳态振动后进行一次测盘,之后输出另一个不相关的伪随机信号,当结构达到新的稳态扳动时,再测量一次。对多次测量结果进行平均即可实现周期随机激励测量。3.2激振器
激振器是通常附在试验结构上的以提供所婴求的输人力的设备,有电动式,电液式和压电式激援器(见GB7670-87)。图2指出了每种类型激振器一般适用的频率范围。GB11849.2-88
tttttt
GB 11$48.2—88
对激振器的基本要求是能提供足够的力和位移,这样才能以适当的信噪比在整个感兴趣频率范圖内进行导纳测最。为了对结构进行足够宽频的随机激励,要求用比正弦激励时澈励力更大的激振器。如果限制带宽,或者采用激励和响应信号波形的时域平均,则可以选用激励力较小的激振器(见5.1.4)由于激振器支承或激振器的自身惯性,输人结构的激搬力会引起对激振器产生反作用力。图3(a)和图3(b)中说明了这些情况。若需要,应当把一个附加质量加到激振器上,以增加激振器的自身惯性。图3(c)是一个不正确的方案,它让激振器的反作用力通过支承振器和结构的共同底座而不全是通过力传感器传递到结构上。结构邀挂
激摄器最性
举据器变本
777777777
外部支承的反作用
一个安装不正确的例子
图3激振器的反作用力
5.3避免附加力和附加力矩
激报器惯性的反作用
导纳测量的基本要求是应在结构上的某点沿某个方向施加激励力。作何附加力和附加力矩不是在激励点沿预定方向的预定激励力和力矩)将使导纳数据产生误差。除支承点外,结构上的其他测点应能自由响应。应尚避免结构和传感器之间以及结构和激振器之间的动力相互作用。为了避免附加力和附加力矩,应号虑5.3.1~5.3.31的有关因素。5.3.1传感器质量负载
在每个传感器连接点上,由干传感器的搬动会产生附加惯性力。可选择符合灵敏度要求的质量最GB 11849.2—89
小的传感器,将质量负载引起的测量误差减至最小。当测量驱动点导纳时,力传感器负载在一定程度上可以通过电学方法给予补偿(见6.2)。5.8.2传感器转动惯量负载
在每个传感器的连接点上,传感器因角加速度会产生附加惯性力矩(特别是具有大转动惯量的阻抗头)。应选择绕其安装点具有较小惯性矩的传感器,使这些附加惯性力矩减至最小。5.3.3激振器的连接约束
在激振器的连接点上,由于试验结构的驱动点的转动和横向响应被约束而产生附加力矩和横向力。例如:激振器一阻抗头组合造成的约束能反过来影响试验结构低阶模态的测量。在试验结构与激振器的连接点上,可采用面积较小的锥头或球形头,使之更接近于点驱动。注:若考虑不周,锥头就球形头反而可能会产生附加力矩。当激振器与轻型结构固定连接进行导纳测量时,常常会产生邀振器连接约束。为了避免由于严重的连接约束引起的测量误差,应当考虑以下几点;覆,使用非接触式激振器。
b对惯性控制的激振器设计个支承系统,使作用于试验结构上的力的反作用既不会引起激振器的任何转动,也不会引起对力传感器轴的任何横向运动。C,安装连接撤振器和力传感器的驱动杆。驱动杆应设计成轴向具有大刚度,而在其他方拘具有足够的柔性,因此,经常使用细长杆。采用两端较细的杆,效果可能更佳。应注意使激振器和驱动杆与力传感器轴在同一直线上。如果使用柔性驱动杆;加速度传感器不应当通过任何中间装置(如驱动杆,它的轴向柔度可能使运动响应测量无效)连到结构上(见图4(a)),而应当直接连到结构上。力传感器应测量由驱动杆传到结构上的力(见图4(b))。如不得不把力传感器置于杆的邀振器端(见图4(c)和4(d)),则应按GB11349.1所述检查驱动杆柔度的影响,并用6.2规定的方法对驱动杆的质量给予补偿。注:驱动杆固有频率在感兴趣频率范围内的弯曲模态可能影响导纳试验。此外,激摄器运动系统的弯曲握动还能对结构产生影响响应测量的力矩。试验结构
试验结构
GB 11349.2-—89
体最器
阻抗头
器动杆
激最摄疑动杆的连接
激振器
魅动杆
力传感赛
加速度传感器
由于驱动杆轴向
柔变的影响。阻
抗头加速度测量
无效。
为确定实际激娠
需作大质量修
不正确的方法
力和加速度测量
不蛋驱动杆柔克
激握器驱动杆的连接最佳方法
图4激搬器驱动杆的连接
的影响。
确定实际激摄力
需作小质量修正。
试结构
GB11349.2—89
激娠器
力传感婴
驱动杆
加速度传感器
硫定实际激惊力
需作大质量情正
(c】激振器驱动杆的连接——折表方法 A激爆量
驱动杆
阻抗头
试验结构
阻抗头加滤度测量不受
题动杆柔度的影响。
确定卖际激援力需作小
质量修正,但当结构的
柔度相当大时,要注意
到阻抗头的转动惯量不
能略,并且将明显影
响数据。bZxz.net
邀娠器慰动杆的连接—折惠方法B续图4
6激励力及运动确应的测量
GB 11349.2--- 88
GB11349.1一89已规定了选择运动传感器、力传感器和阻抗头的基本准则和要求以及确定这些传感器特性的方祛。
通常用于谢结构频率响应的传感器是压电加速度传感器、压电力传感器及阻抗头。也可用位移传感器或速度传感器来代替加速度传感器,某些位移传感器还具有非接触測量的优点。当采用脉冲激励时,压阻加速度传感器具有一定的优点。所用传感器的频率响应和线性范围应足够宽。对每个频率,运动传感器测出的位移x、速度和加速度三个尖盘之间的关系为:a=( 32) =(2) 1 x
武中=-,
f有关的频率,Hz。
6.1传感器的连接
通带用螺栓或粘接剂把力传感器和运动传感器安装在结构上。应采用尽可能少的中间件直接地通过力传感器或阻抗头把激励力传递给结构。如果结构上传感器安装点的表面不平,可以采用某种遥当形状的固定垫。,传感器和安装面间的粘性液体(如重油或润滑袖)的薄膜可以改善高频时翻者闻的耦合。,应如GB11349.1一89所述的那样检查连接柔度的影响。应按传感器制造厂推荐的紧固力矩把力传感器拧紧。.2质盘负裁和质盘补偿
如5.3.1所述,为了进行试验而加到结构上的质量应该尽量的小。当对轻型结构进行试验时,可用电路来补偿结构驱动点处的传感器和连接件的总有效质量m·,在感兴趣频率范围内的所有频率厂(单位,Hz)处,当试验结构的驱动点导纳值小于0.01/厂m,时,应该考虑质量补偿。质m,是连接件的质量和力传感器或阻抗头的有效端部质量的和。质量补偿的方法是:在模拟电路或数字电路中,将得到的激励点的加速度信号乘以要补偿的总有效质鼠而!。这个乘积是激搬器输出力的一部分,它是使附加到结构上的有效质量产生加速度所需要的力。为获得作用于试验结构的净缴励力,应在模拟电路或数字电路中把这个力信号从力传感器信号小减掉。
注:①如果在力传感器的下面安有一个加速斑传感器,则这个加速度传感暴的质盘也应包含在总有效质盘mt之内。②在测量骤动点导纳时用于测盘结构响应的加速度传感器也可以提供使有效质盘产生加速度所要求的力的信号,但是在测盘传递导纳时,在结构的躯动点需要有个单独的加速度传感器,获得质量补偿所需的加度信号。
③质量的电路补偿不能补偿转动惯益负载,它仪仅能补偿躯动点处并落激励方向的惯性负裁。其他所有的附加力只有靠选择小惯性的传感器把它们减至最小。结构的末补偿掉的惯性负裁会引起测战误年。这些测盐误差包含响应蜂情赖率的偏移。
@在采用质盘补偿方法之前,应优先考虑传感器的选择和连接件的重新设计。另外,为了避免大的测耻误差,只有当连接件和传感器的有效质与试验结构在驱动点的自由有效质显之比大}\0.1H小于0.5的情况下,才进行质最补偿。
6.8信号放大器
压电武的力传感器和运动传感器需与电荷放大器或高输人阻抗电压放大器连用。注:①某些压电传感器配有内部电子线路,它要求与这个线路匹配的放大器。②电压放大器的灵敏度受传感器电缆阻抗的影响。电压放大器比电荷放大器低频响应限制更严。6.4校准
GB11349.1一89规定了对传感器进行基本校准和补充校准的要求。它可确定导纳测量用的压电传感器的适用性。
GB 11349.2 — 80
系统校准是通过测量自由悬挂且质量已知的性块(校准块)的导纳或加速度导纳完成的。测量系统应与试验时相同。测得的校准块的频率响应与理论值的误差应在土5%以内;校准块的加速度导纳的理论幅值为1/m,导纳为1/(2元fm),这量m是校准块的质最。系统校准时采用的连接件应与测量时一样,从而可检测出连接柔度产生的误差(见GB1.1349.1一89)。选择校准块的质量,使其导纳在测量的导纳范围之内具有代表性。如有必要,为了覆盖所测最的导纳范围,应使用多个校准块做几项系统校准。
7传感器信号的处理
7.1.频率响应函数的确定
运动信号和力信号都应当用能滤波(如有要求,还可进行量补偿)的信号分析仪加以处理,并确定这两者的幅值之比和相位差,幅值和相位差均甚额率的函数。分析仪还应完成将测量的频率响应函数转换为其他形式(例如,将加速度导纳转换为导纳)的数学运算(见第6章).7.1.1和7.1.2规定了在5.1中讨论的各种邀励被形的处理要求。7.1.1正弦激励
频率响应函数的幅值是两个正弦信号的相量(复失)幅值的比,它可以用模拟或数字方法来确定。频率响应函数的相位由测量这两个信号的相位差来确定。注:若采用步进正弦激励,测量中在每个激励频下,把单个响应通道从·个响应传感器转换到下·个响应传感器,则可以得到若十个频率响应函数。若采用慢扫描正弦激励,在一次扫描中,每个响应通道只能测量一个点的赖率响应函数。
7.1.2随机激励
用随机、周期随机、伪随机、周期正弦快扫或脉冲激励产生的传感器信号应通过数字傅里叶变换分析仪处理。如GB11349.1一89所述,频率响应函数可用运动响应与激励力的互谱密度除以激励力的自谱密度得到。通过对时域加权后的激励和响应信号(见7.4.2)进行离散傅里叶变换来计算上述谱。在每个共振频率处,为了使置信度大于90%,也就是在每个共握频率计算的驱动点导纳的随机误差小于5%,应对足够数最的谱进行平均(见附录A)。在计算相应的传递导纳时至少要对相同数目的谱进行平均。
汁:①当测量传递导纳时,不可能达到上述盘级的置信度,特别是在传递导纳值很小的情况下更是如此。在这种情况下,除「相应的驱动点导纳试验所要求的平均谱数外,再增加平均谱数作用不大。②双通道傅里叶分析仅在一次测量中只能得到单个频率响应函数。若想同时测整多个频率响应函数,可采用多通道信号分析权。
7.2滤波
7.2.1正弦激励
用应于激励频率的响应和激励信号分量可以计算出频率响应函数。用跟踪滤波器或同步数字采样可把噪声和谐分量减至最小,而且不改变激励信号和响应信号间的相位差。7.2. 2随机激励
当采用随机激励时,不可能从激励信号和响应信号中滤出噪声和谐波分量。用限制频带(细化)技术能提高信噪比,但应如。4.2所述的那样,选择适当的滤波器以限定激励频带宽度。当运用数字分7. 4 频率分辨率
GB 11848 .2 89
在感兴趣的频率范围内;分辨率应足够高,以分辨出试验结构全部特征频率及估计模态阻尼。7.4.1正弦激励
对于慢扫描正弦激励和离散步进正弦激励,为获得有效的共振频率分辨率,要求邀励频率的变化足够慢(见8.1)。
7.4.2随机激励
对于如5,1,3和5.1.4所述的激励波形,在离散傅里叶变换中,要得适当的频率分辨率就要求很小的频率增盘。频率增量(谱线间隔)应由试验结构的模态密度和模态阻尼来确定,选用海宁窗或其他适当的窗函数对信号在时域加权应使频率分辨率提高。注,①对于小阻尼结构,若要在整个感兴题频率范图计算出邀励和响应信号的诺,则所需要的数据样本的数目很大,也可用限制在某一选定频带上的博里叶分析(细化);或者把这两种方法结合起来使用。在任种情况下,所要求的总时间《记录长度)都是所要求的频求增量(分辨率)的倒数。②随机激励可滑成是脉冲函激的时间序列(杜哈梅方法)。一个数据块的样本起点的响应主要是先前激励的结果,这样的响应与励并不对应(相干),靠近数据块的尾部仍然有激励,但响应已被截断,截断所造成的影响与囊减时间与数据块总的来样时间的比以放数据块中邀励脉冲的位置有关,这会导致相干。激励和响垃数桐相干按好的部分可在数期块的中找到。有时推荐用海宁密来改善导纳数据的相干。7.4.3周期激励
周期随机、周期正弦快扫和脉冲激励都与7.4.2所描述的情况不同。因为周期激励产生首尾相连的数据块序列,开始时的瞬态值转移到下一个数据块,经过一定时间之后,每个数据块都包括全部的响应数据。从原理上来说,不需取平均。在其些情况下,相干函数可用来估计外部噪声的影响并指导信号平均次数的选取(见附录A)
8激励的控制
为了获得适当的频率分辨率,需要控制激励时间,为获得适当的动态范用,通常需要控制激励的幅值。
8.1正弦激励所要求的时间
无论采用扫描或者步进正弦激励,为了得到所要求的顺率分辨率,应该控制激励频率变化率(或步长和速率)。为了精确地确定幅值和相位,并获得用于计算固有频率和结构阻尼的正确信息,在结构的共振和反共振区城内要求较高的分辨率。表.1.1离散步进正弦励
当应用步进正弦激励时,最靠近结构的每个共振频率的激励频率与该阶共振频率之差不会大于频率步进增量的一半,这样,确定共振频率的最大误差是频率增量的1/2。另外,测量的结构蜂值响应的幅值很可能比真正的共报峰值要小。表中给出了误差的上界。结构响应峰值的测景误差会导致对结构模态阻尼估计得过大。
在共报频率土10%频率范围内,频率增量的选择,应使测得的蜂值响应的幅值和模态阻尼比与其真实值的偷差小于5%。
用离散步进正弦激励测量结构共振时运动响应幅值的最大误差见下表。步进频率增摄与结构模态的真实半功率带宽的比
GB 11349.2—89
响应峰值测素的最大误差
附录B给出了符合这个要求的用于确定最大频率增量的公式。还给出了在每个频率激励的持续时间。对于共振频率或反共振频率士10%以外的频率,可以采用更大的频率增最和更短的持续时间。8.1.2慢扫描正弦激励
当采用慢扫描正弦激励时,频率以时间的线性函数或者以时间的对数函数变化。扫描速率的选择,应使在非振频率±10%以内测得的结构运动响应的幅值与真实值的偏差小于5%。对于线性扫I描激励,最大扫描速率Sm:(Hz/min)应为:S m*<54( Fn) 2/02 .**
对于对数扫描激励,最大扫描速率s m%(oct/min)应为S mx<77.6fa/Q2
上述两式中,f,
估计的共振频率,Hz!
一在该共振频率处,估计的结构模态的品质因数。若满足上述两式,则测鱼基本上是稳态的测量。8.2随机激励所要求的时间
施叫激励和测量响应要有足够长的持续时间,以便对7.1,2中所规定的数目的谱进行平均。(2)
要平购的谱数是测量系统信噪比的函数。应该用激励力信号和运动响应信号间的相干函数来确定使在90%的置信度内随机误差小于5%所必须加以平均的最小谱数(见A2)。每个谐所要的撤励时间应是离散傅里叶变换的频率增量的倒数(见7.4.2的注)。8.3动态范用
小阻尼结构的导纳幅值范围可能大于105:1(10dB)。每个数据通道除了有一个最高工作电压外,还有一个最低电压。若高于最高电压会发生饱和,若低于最低电压,则电路噪声及数字系统中与数字化处理有关的噪声与信号相比就变得很显著了。为了测量精确,应该控制激励,使两个通道内的电压都在规定的界限以内。为了得到合适的动态范围,在8.3.1和18,3.2中给出了当使用不同类型的激励被形时,进行激励幅值控制的指南。8.3.1正弦激励
采用常幅值激励时,导纳测景可获得的最大动态范围就是测量系统响应信号通道的动态范围(一般是300:1或50dB)。为了增加可达到的范围,在每个共振频率的附近应减小激励幅值,而在每个反共振频率附近应增加激励幅值。图5(a)说明了采用常幅值激励可达到的动态范围的局限性。采用常幅估激励,由于测最最大运动响应时放大器饱和,测得的最大运动响应值小于真实的最大运动响应,电路噪尚限制了结构反共振的真实运动响应的测量,图5(b)说明了通过适当控制激励力幅值能改善达到的动态范围。
小提示:此标准内容仅展示完整标准里的部分截取内容,若需要完整标准请到上方自行免费下载完整标准文档。