1范围
GB/T 20485.11—2006/1S0 16063-11:1999振动与冲击传感器校准方法
第11部分:激光干涉法振动绝对校准本部分规定了绝对法校准直线切速度计(带放大器或不带放大器)的仪器设备和操作程序,以及采用稳态正弦振动和激光干涉测量法获得加速度计复灵敏度的幅值和相移的方法。本部分适用的频率范鼠为 1 Hz~~10 kHz,动态范谢(幅值)为 0. 1 m/s°~1 000 m/s依频率而定)
本部分第3章规定的测量不确定度蓝了上迷范围。若校准频率低于1Hz(如:其他国际标准中的考赖率为 0,4 Hz)和如速度幅值小于 0. 1 m/3(如:1 Hz 时为 0,004 m/s).可选用一个合适的低频极动台,并采用本部分中规定的方法 3。力法 1(条纹计数法)适用于频率范围为 1 Hz~~800 Hz的灵敏度幅值校准。特殊条件下,可用于较高频率段(见第8章)。方法2(最小点法)适用丁频率范围为800 IIz~10kI[z的灵敏度幅值校准(见第9章)。方法3(正弦逼近法)适后于频率范用为 1 Hz~10 kHz 的灵敏度幅值和相移的校准(见篇10幸)。
为法1及方法3规定在不同频率点、固定的加速度幅值下进行校推:方法2则要求在固定的位移崛值进行校准(其切速度幅值随频率变化)。2规范性引用文件
下列文件中的条款通过GB20485的本部分的引用成为本部分的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本部分,然面,鼓励根据本部分达成协议的各方研充是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本部分。bzxz.net
GB/T3240—1982学测量中的常用频率GB/T13823.1—2005振动与冲击传感器校准力法第1部分:基本概念(1S016063-1:1998Y
1SO2041振动与冲击词汇
3测量不确定度
应用本部分达到的测盘不确定度为:a)灵敏度幅值
参考条件下测量值的不确定度为 0.5%非参考条件下,测值的不确定度不超过1%b)灵敏度相移
参考条件下,测量值的不确定度为0.5°;非参考条件下,测量值的不确定度不超过1°。推荐参考条件为:
频率(Hz):160,80,40,16,8(或者:角频率w=1 000.500.250、100,50 rad /s);加速度(m/s2)(加速度幅值或有效值):100,50、20,10,5.2,1。CB/T 20485. 11—2006/LS0 16063-11:1999放大器置的选择应考虑噪声、失真及截止颊率的影响,使其达到最佳性能。注:报据GB/T13823,1-2005,测址不确定度表示为测量的扩展不确定度(简称不确定度)。4仪器设备要求
4.1总则
为了满足第1章中的测最范国及达到第3章中的不确定度要求,本条款给出了所需仪器设备的推荐技术指标。
充许有的系统只用于上述测盘范围的一部分,通常使用不同的系统(例如振动台)覆盖全部频率及动态范围。
注;本条款所述仪器设备,包含了本部分插述的三种校准方法所涉及到的全都仪器及设备。在特定方法中使用的仪器设备已做了单独注明(感图 1、图 2,图 3)。4.2频率发生器和指示器
应满足下列特性要求,
a)频率不确定度;不超过读数的0_05%b)频率稳定度:测量期间不超过读数的士0.05%:c)幅值稳定度,测垒期间不超过读数的士0.05%。4.3功率放大器和振动台
应满足下列特性要求:
a)加速度的总谐波失真:不超过2%;横向,弯曲及摇摆加速度:应当足够小,以避免对校谁结果产生过大的响。当幅值较大,尤6)
其是低频范围为1H2~10Hz时,横向运动应小于所要求轴向运动的1%,频率范围在10 Hz~~1 时,允许的最大惜向运动为轴向运动的 10%。赖率高于 1 kHz时,元许的最大横向运动为轴向运动的20路:
)交流声及噪声,比满量程输出至少低7Bd)加速度幅值稳突性:测量期间不趋过读数的士0.05.%。由安装表面引人最小的加速度计基座应变(见 4.15)。4.4握动台和激光于涉收的隔振块为了避免大地脉动引越的相对运动和振动台支撑结构的反作用力对校准结果产生过大的影响,振动台及下涉仪应安装在起篇振作用的同·个大质量块或两个不同的大质量块上。如果用一个隔振块,质量应至少是运动部分质量的2000借。由此在加達度计与平涉仪之间引起的相对振动小于0.05%。姆果隔振块的质量较小,应考虑由振动台弱起的磨振块的运动为诚小大地扰动的影响,用在题率范国为10HIz~10kHz的随振块应放置在专门设计的阻尼弹簧上,以使干扰影响带来的不确定度分最降至0.1%以内。4.5激光器
应使用发射红光的氧就激光器。在实验室条件(即:大气压 100 kPa,温度 23℃,相对湿度 50%)下,激光波长为 0.632 81 μm,本部分采用该值。
如果激光器具有于动或自动气压补偿功能,应将其设置为零或关闭。还可以选择其他已知波长并且稳定的单频邀光器。4.6早涉仪
应选用迈克尔逊激光下涉仪,该干涉仪具有可检测于涉信号带的光电接收器,其赖率响应具有所需的带宽。
其中,所需最天带宽可根据下·由测得的速度幅值m计算出:fma,=VmxX3.16X10°m-l
对于方法1(见图1)和方法2(见图2),采用具有单个光电接收器的普通迈克尔逊干淤仪即可。方2
GB/T 20485. 11—2006/1SO 16063-11:1999法3(见图3)则诺要一个改进的迈克尔逊干涉仪,它具有正交信号输出,并带有两个光电接收器检阅干涉信号光束。改进的近克尔逊干涉仪的结构见图4。1/4波片将人射的线偏振光分成偏振方向相互垂直、相位差为90°的调个测量光束。在与线偏振参考光束发生干涉后,两个正交偏振光束由适当的光学器件分开[例如:沃尔斯顿(Wollaston)棱镜或偏振分光镜],并由两个光电二极管探测,改进的迈克尔逊干涉仪的两路输出幅值的偏移量应不超过士5%.相对幅值偏差应不超过士5%,与90°名义角度的偏差应不超过二5”。为确保这些允差,要采用适当的方法调整两路十涉信号的偏移量、幅值大小及角度偏差。
当位移较大时,很难保证改进的迈克尔逊干涉仪两路输出信号的幅值偏差不超过上述允差。为使其符合第3章中的测量不确定度的要求,至少在位移小了2μm时要保证上述允差。当位移较大时,允许增大充差。
示例:位移幅值为2.5zumr即:赖率1Hz加速度幅值为0.1m/s\)时,储册和幅值相对偏差的允许误差可增大到三10%,偏离90°名义角度的允差可增大到士20°(见10.2迁1)。注:方法1、方法2、方法3中的改进的迈充尔逊下部仪可用其他适当的双光束平仪代替:如(改进的)马瑟-泽德(Mnch-Zehnder)干涉议。
4.7计数器(用于方法 1)
应满足下列特性要求:
频率范围:1Hz到最大所需频率(使用的典型值为20MH2):a
b)不确定度:不超过读数的0.01%,可用一-个具有相间不确定度的频比计数器代替计数器。4.8可调谐带通滤波器或谱分析仪(用于方法2)应满足下列特性要求:
频率范围:800 Hz10 kHz;
b)带宽:小于中心赖率的12%;滤波器斜率:大于24dB/0ct
信噪比:信号最大时,天于70dB:d
动态范围:大了60dB。
4. 9零值检测仪(用于方法2)
应使用频率范围为800Hz~10kHz的零值检测仪(如果在方法2中使用了谐分析仪,则不需要使用该仪器)。该仪器的频率范阅应该满足检测带通滤波器输出噪声的要求。4.10测盘加速度计输出的真有效值电压表应满足下列特要求:
a)频率范围:l Hz~10 kHz;
b)不确定度:不超过读数的 0.1%用有效值乘以因了-/2,得到计算公式中的信号幅值(单峰值)。对于方法1及方法2.应使用有效值电压表。对方法3,则应按4.13使用一种特殊的电压测量仪器;可以使用有效值电压表(可选)。4.11失真度测量仪
失真度测量仪应能够测量远小于1%~5%的总谐波失真,并且满足下列特性要求:8)频率范围:1Hz~10kHz,能够测量到5欲谐波,b)不确定度:失真度范围在0.5%~5%时,不超过读数的10%4.12示波器(可选)
可选用频率范围从1Hz到高频端最小为2MH2的示波器,以确定干涉仪的最佳特性和检查干涉仪信号及加速度计信号的波形。4.13带计算机接口的波形记录仗(用于方法3)可采用带计算机接口的波形记录仪。该记录仪具有模数转换功能,并能存储干涉仪的两路正交输3
GB/T 20485. 11—2006/ISO 16063-11: 1999出信号及如速度计的输出信号。它的幅值分辨率、采样率及存储容量应足够大,以在校准的幅值范围内,满足第3章中规定的不确定度。通常用于加速度计输出的幅值分辨率应不小于10位,用于干仪正交输出信号的分辨率应不小于8位。用一个两通道的波形记录仪记录干涉仪输出信号,另一个波形记录仪(具有更高的分辩率和更低的来样率)记录加速度计输出信号。在任何情说下,干涉仪及加速度计输出信号的数据采集都应同时开始.同时结束,其不确定度应该使得校准的测量不确定度符合第3章的规定。
当速度最大时,干涉仪输出信号的同期最短,在最短周期内,应保证有足够的采样点数(符合10.3的规定)。对于一个给定的加速度幅值,当频率降低时,位移幅值会相应增加,这就要求记录仪具有更高的采样率及更大的存储器。如不能达到上述要求,应减小加速度幅值。示例:在振动断率为1Hz、加速度幅值为0.1m/s的条件下校催加迹度计时,如果采样率不小于512kHz则存储容盘应不小于 4 M字节。
4.14具有数据处理程序的计算机(用于方法3)应使用具有数据处理程序的计算机,程序应按照10.4中描述的计算过程编制。4. 15 其他要求
为获得所要求的0.5%的测量不确定度,推荐最好将加速度计和与之配用的放大器作为一个整体一起进行校准。
加速度计应该是刚性结构。在计算测量不确定度时,应考虑基座应变灵敏度、横向灵数度以及加速度计和放大器组成套组的稳定性(参见附录A)。校准背靠背式参考加速度计的灵敏度(幅值和/或相移)时,应加装·-个模拟质量块。模拟质量块的质量应该与比较法校准时以背靠背方式安装在参考加速度计上的被校加速度计的质盘相同。模拟质量块的质量通常为20书。激光的光点可以照射在模拟质量块的顶部(外表面)或参考如速度计的,上表面。如果检测模拟质量块顶部运动,质盘块的项部应该是抛光的表面,激光光点的位置应靠近该表而的儿何中心。如果质量块的运动不能视为刚体运动,应考虑其顶部与底部表面的相对运动。要想模拟一个典型的质量为20g的传遵标准加逆度计,应使用上下表面均为六边形,长度为12mm、宽为16mm的六角型钢样。例如:在频率为5kHz时,相对运动引人幅值测量的系统误差为0.26%,引入相移测显的系统误差为4. 2°。
如果通过模拟质量块上的纵向通孔来检测参考加速度计的上表面运动,在某些特殊的频率点可能会在孔内产生声共振,这将影响(增加)这些频率点及其邻近频率点的测量不确定度。在不确定度计算时,应加以考虑。
5环境条件
校准应在以下环境条件下进行:a)室内温度:(23士3);
6)相对湿度:不太于75%,
应注意避免外部振动及噪声对测量结果的影响。6优先选用的加速度及频率值
均匀覆盖加速度计工作范围的加速度(幅值或有效值)和频率应按以下系列值优先选用:a)加速度值(方法 1 和方法 3),m/s:——0.1,0.2、0.5、12,5、10,2050,100,200,500,1000(1000m/s仅适用于灵敏度幅值的测量);b)颊率,Hz:
在1Hz--10kHz范围内,按GB/I3240—1982标准的1/3倍频程频率系列进行选取(或由a一l 000 rad/s推算出的角频率系列)。4
三种测盘方法的通用步骤
GB/T 20485.11--2006/ISD 16063-11:1999对每一个频率与加速度的组合,其失真度,横向,弯曲及遥摆加速度,交流声和噪声都应控制在适当的量级,以满足第3章中的不确定度要求(见4. 3)。与加速度计配用的放大器设置(增益和频率范围)应按照校准要求进行设置和记录。8方法 1;条纹计数法
8.1总则
本方法适用于频率范围在1Hz~800Iz的加速度计灵敏度幅值的校准,注:如果通过特殊方法(见参考文献[2]和[4]>减小量化误差·方法1也可以应用于更商频率点的校准。在给定加连度幅值(如:100 m/s)的条件下,此方法可以实现更高赖率的校准。8.2测量步骤
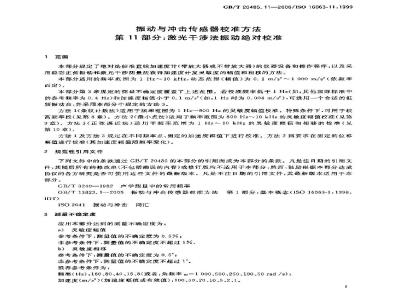
将激光干涉仪调整到最佳状态后(见4.6),在所需振动频率加速度蝠值(见第6章)下,通过使用计数器(4.7)测量下涉条纹频率(使用图1的条纹计数法),或使用频比计数器(4.7)测盘干涉条纹频率和振动额率的比值的方法,来确定加速度计的灵敏度。t
频率发生器(4.2);
功率放天器(4.3);
3—-扳动台(4.3);
一旅动台运动部分!
模拟质色块!
加速度计:
7—放大器;
8-—千部仪(4.6)
激光器(4.5>+
一光电接收器;
题比计数器(4.7)1
计数器(或频比计数器)(4.7):电压表(4.10);
失真度仪(4.11);
示波器(4.12)
图1条纹计数法(方法1)测盘系统5
GB/T 20485. 11—2006/IS0 16063-11: 19998.3测量结果的表达
见录B的B1。
加速度计的加速度幅值,用m/s表示,由干条纹赖率的读数计算:a = f, ×3. 123 × 10-m
灵敏度(幅值)S,用V/(m·s-3)表示,山下式计算:毫×0.3202×10m*l
武中,
一加速度计输出的电压幅值;
振动台振动频率;
一于涉条纹频率,即:在一个足够长的时间周期内所记录的干涉条纹数除以时间间隔。如果使用频比计数器,则加速度幅值a,用m/s*表示,由下式计算:4 = R, × 3. 123 × 10 -m
灵敏度(幅值)S,用V/(m.s-)表示.由下式计算:s
式中:
X 0. 320 2 X 10°m -I
(4)
(5)
在足够多的振动周期(取决于握动赖率,例如 160 Hz时应至少有 100 个振动周期)内,干涉条纹频率f,与振动频率于的比值。校谁结果报告中的测量扩展不确定度的计算应符合附录 A的要求。9方法2:最小点法
9.1总则
本方法适用于频率范围为800F-Iz~10k[z的加速度计灵敏度幅值校准,往: 本条款叙述的方法使用第一类一阶 Besse1 函数点对应的白变册俏来确定位移(见附录 B中的 B, 2)。 也可以使肝第一类零阶 Bessel 函数零点对应的自变量值的等效方法来确定位移。 但足,后者需要对参专镜的位量进行调制(见参考文献[5])。
9.2测量步骤
用中心频率等于振动台频率的带通滤波器(4.8)对光电接收器(4.6)的输出信号进行滤波。滤波后得到的信号包含一系列加速度计位移幅值的最小值点,见表1。设置校准频率,然启从零开始调节振动台振幅,使滤波后的光电检测信号达到一个最大值后返回到一个最小值。这个最小值是第一个最小点.该点对应的振幅为0.1930μm。其他最小点对应的搬幅可以依次从表1 中查得。最小点法的测册系统如图2 所示。注1:也可使用第一类零阶Hcsscl函数确定加速度灵敏度,这时要用一个低于较准期率的伤号激励参考反射镜,并将带通越波器或频率分析仪的中心频率调节到参考反射镜的谢励频率(见参考文献[6])。注 2:也可采用参考镜位置的调制来提高第一类一阶 Bes%e] 西数最小点法的使用效率(见参考文献[7])。表1小点所对应的位移幅值(1=0.63281μm)最小点
位移幅位3/
最小点
位幅值/
最小点
位移牺位 5/
2, 570 4
2. 728 64
表1《续)
GB/T 20485. 11—2006/ISO 16063-11: 1999最小点
校准结果报告中的测量扩展不确定度的计算应符合附录A的要求。9. 3 测量结果的表达
也可参见闭录 B中的 B. 2。
1—题率发生器(4. 2) ;
-功笋效大器(4.3)
振动台(4.3);
一据动台运动部分:
5--模质盘块:
一加邀度计;
一放大器:
-干涉仪(4.6)1
9— 激光器(4.5),
光电接收器:
類率分析仪(4.8);
位移幅值3/
一可按振动频率调谐的带通滤波器(4.8)12
一电压表:
电压表(4,10)
15—失真度仪(4. 11),
示波器(4.12)。
图 2最小点法(方法2)潮量系统
GB/T20485.11—2006/IS016063-11:1999加速度幅值t,用m/s表示,由下式计算:2 = 39, 478 X 3F2
灵缴度(蝠值)S.用V/m·s-\)表示.由下式计算:S = 0. 025 33 X
式中;
-加痤度计输出电压的幅值:
-对应于表1 中各最小点的位移幅值;振动台的频率。
10方法3:正弦暹近法
10.1总则
本方法适用于频率范围为1 Hz~10 KHz的加速度计灵敏度幅值和(或)相移的校准。10.2测量步骤
按照图3和图4进行设警的安装
(7)
调节激光干涉仪电图4示例),使其输出为两路相位正交的信号2,和uz其允差满足4.6的规定。调整干涉仪(4.)到最佳工作状态后,在规定的振动赖率和加球度幅值(见6章)下,按以下步骤进行加速度计灵敏度幅偏和相移的测量。1一一频率发生器(4.2):
2—功率放太器(4.3);
抵动台(4.3)
振动台运动部分1
模拟质互块:
加速度计
做大器:
十涉仪(4.6):
激光器(4.5):
光电检阅器:
数字波形记录仪(4.13):
—电压表(4.10);
失其度仪(4.11);
示被器(4.12).
图3正弦逼近法(方法3测量系统GB/T20485.11—2006/[S0 16063-11:1999对加速度计施加正弦振动。其位移幅值应该足够大,以使干涉仪输出至少有一个完整的明暗条纹。
往 1:当位移值不大于 0. 5 μm时,满足 4. 6规定允差的正交输出信号包含多种干扰因素,其综合影响可能会引起灵敏度值测证的最大误差不小于0.3%,相移诞盘的最大误差不小于0.3°。按照比4. 6更严格的允差进行调整[见参考文献[8]或者通过使月参考文献[的所提供的修正程序】,可以践小该项误差,注2:为了实现纳米级小位移振姆范田内的加速度计复灵敏度的抵值和相愁的测底,可以将正弦通近法与适宜的外差技术相结合,见参考文献[10_和[11]。它可以在推荐的适中加速度幅值(如100 m/s)下进行离频校准(如20 kHz).
注3:如架采用的正弦通近法程序已满足第3章不确定度的要求,妥想提商程序的抑制效率,可以对位秘值或调相值进行加离处理[12]-
参考镜
振动自运动部分:
3——加速度
1—-模拟质块+
5-分光镜;
10.3数据采集
6.偏光镜;
一数光器;
8——沃尔斯顿棱镜:
9——光电接收器。
图4正交激光干涉仪
应该设置低通滤波器和高適滤波器(如使用)的截止频率,将低,商通滤液对校谁结果的干扰影响控制在允差范面以内(见参考文献[)。为满足奈牵斯特(Nui}定律,采样率的设置应使最高频率小于采样率的1/2。
可以采用与干涉仪输出信号模数转换速率相同的或较低的采样率,完成加速度计输出电压信号的模数转换。三路信号的采样应该同时并始,同时结束,并且至少保证其中下仪的两路输出信号采用同一系统时钟进行同步来样,
应在t10.4.1通过下列步骤计算出加速度计灵缴度的幅值和相移。10.4.2利用采样得到的干涉仪输出值u1(z,))和(u2(r,)),由下式计算调相值序列iPMa(t:)):ma(z) = aretan (e)+
1(高)
GB/T 20485.11—2006/IS0 16063-11:1999式中 -0,1, 2, ...
应适当选择n元项中的n为整数,以使调相值序列(())连续。注 用于整数为计算的程序可见参考文献[13]。10. 4.3使用最小二乘祛,通过解算具有A,B,C三个未知参数的下列N十1个方程构成的方程组,遍近上式求得的调相值序列(@Mn(t;)):式中.
i-0, 1, 2. .... N;
A=pm co3g.3
B=gm sing.:
C——常数:
—振动角频率,—2元/
5—一位移的韧相位角;
PMa (t.) = Acosul: -Bsinealt: +CN十1—在10.3给出的测量周期内,同步采样得到的采样点数。在“正弦通近法”求得的参数值中,不需要使用参数C,10.4.4用正弦逼近法求得的参数值A和B,计算相位调制项幅值m和位移的初相位角节:Pu=VA+B
garctan
10.4.5用相位调制项幅值m和位移初相位角,计算加速度幅值和加速度初相位角:a = pm
-( 10)
--( 12 )
10. 4. 6利用 10. 4. 3 介绍的正弦逼近法,逼近加速度计输出采样值序列(u(t,))。将用 μ表示的加速度计输出代人调相值方程进行改写,得到下列N十1个方程构成的方程组.进行求解:u(r) = A.cosut,- Businati+Cu式中:
A,=acosqu;
Buzsinpu,
Cu—常数,
加速度计输出信号的幅值;
一加速度计输出信号的初相位角。【14)
10.4.7用正弦逼近法求得的参数值A。和B.,计算加速度计输出信号的幅值t和初相位角@ut=VA+B
arctan
10.4.用式(15)和式(16)求得的和9。的值,以及式(12)和式(13)求很的a和4.的值,计算加速度计复灵敏度的幅值S.和相移公9:S.
A4 = — F.
( 17
校准结果的报告应包括按照附录A计算出的校准中的测量扩展不确定度。在附录A的A.1.3.1和A.2.1中,复灵敏度的幅值用 S来表示。10
1校准结果报告
GB/T20485.11—2006/ISO 16063-11:1999校准结果报告中,除校准方法以外,至少应该对下列校准条件和特性参数给予说明:a)环境条件:
加速度计的温度;
一环境空气温度。
安装方法:
安装表面的材料;
一安装力矩(如果加速度计是螺栓安装);油或油脂(如果使用);
一电缆固定:
—方向(垂直或水平)。
模拟质块(如果使用):
一材料(如:钢)、尺寸(长度、直径)和质量安装力矩,
-为了补偿上下表面(只要使用)之间相对运动的影响,给出灵敏度(幅值)修正值和相移修正值。
d激光反射:
反射镜(抛光表面或镜面);
激光光点在反射面的位置。
e)放大器的所有设置(如果可调),例如:-增益,
一滤波器的截止频率。
校准结果:
校准频率和加速度幅值:
灵敏度值[幅值和相移(如果测母了相移)测量的扩展不确定度,如果包含因子后不等于2,给出支值。11
GB/T 20485. 11—2006/IS0 16063-11: 1999驸录A
(规范性附录)
摄动与冲击传慰器激光干涉法绝对校准中的不确定度分量A. 1 在选定校准频率、振幅,设量放大器增益和敲止频率的条件下,灵敏度(幅值)测量的相对扩展不确定度和相移测量的扩展不确定度的计算A. 1. 1方法 1灵敏度(幅值)校准的相对扩展不确定度Uμ(S)的计算在选定校准频率、振幅、设置放大器增益和截止频率条件下,灵敏度(幅值)测量的相对扩履不确定度Um(S)的计算,应根据GB/T13823.1—2005,按照以下公式进行:U.(S) = ku..nl(S)
uerI(S) = ue(S)
中包含因子一2。
不确定度分量见表 A. 1。
衰 A. 1 不确定度分量
标准不确定度
分母)
ut fe)
不确定度来源
加迹度计输出电压的测量(电医表)总失耳度对加速度计输出电压测盘的影响横向、摇揭和弯曲加遮度对加速度计输出电压测量的影响(横向灵敏度)
位移函化对位移到盘的影响
脏发滞后对位秘测量的影响
泌被对位称测量的影响(频率带宽的限制)电压扰动对位移测量的影响(如:光电测世回路中的随机噪声)
干忧运动对位移谢量的影响(如总失真度;如速度计参考平而与于涉仪的测册光点之间的相对运动)相位扰动对位移测量的影响(如:干涉仪信号的相位噪声)其他干涉效应对位移测量的影响(干涉仅的功能)振动频率的测盘(赖率发生器和指示器)其他效应对灵敏度烈量的影响(如:重复刷量中的随机响算术平均值的实验标准偏差)
A. 1. 2 方法 2 灵敏度(幅值)测量的相对扩展不确定度 U,(S)的计算.(A.1)
..( A.2
不确定分母
大小()
Wa (S)
wna(S)
灵敏度(幅值)测量的相对扩展不确定度U
小提示:此标准内容仅展示完整标准里的部分截取内容,若需要完整标准请到上方自行免费下载完整标准文档。